USELESS MACHINE
El presente proyecto permite una comunicación adecuada entre dos “useless box”, así como una interfaz donde se pueden seleccionar diferentes tipos de operación basados en la comunicación de las cajas. Se desarrollaron en paralelo dos “Useless Box”. Cada caja está compuesta por una tarjeta ESP32 y un Arduino Uno. Se desarrolló una comunicación física entre el Arduino Uno y la tarjeta ESP32 para el control de actuadores; y la comunicación inalámbrica de las ESP32 se desarrolló con el propósito de que estos robots pudieran actuar en modo maestro-esclavo.






Diseño realizado en CAD

Modelo de comunicación entre las useless machines
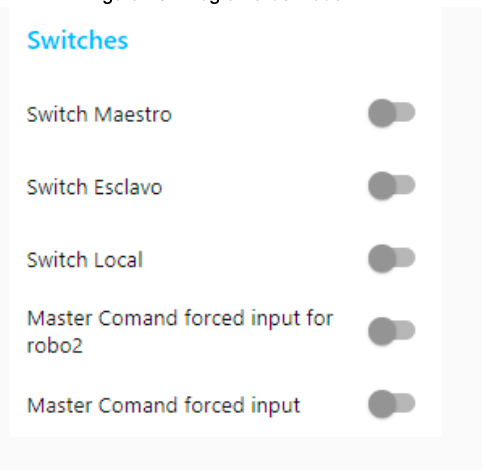
HMI
